Выбор элементов системы согласно структурной схеме
* В случае применения оптронной развязки чувствительность может оказаться ниже порядка 0,5 В из-за падения на переходе входного светодиода.
** В таблице приведены данные стандарта EIA RS485. Реальная скорость зависит от длины кабели и применяемых схем передатчиков и приемников.
Передача полезного сигнала осуществляется изменением направления протекания тока (1 - в прямом направлении, 0 - в обратном, рис.1).
 рис.1
рис.1
В неактивном состоянии передатчик переводится в 3-е состояние с высоким импендансом. Обычно вход приемника и выход передатчика объединены вместе и связь осуществляется по двум проводам (витой паре). Кроме того, прокладывается и третий провод, так называемый дренажный проводник, который присоединяется к сигнальным землям каждого устройства. Допускается непосредственное присоединение сигнальной земли к точкам с нулевым потенциалом (корпусная земля) на устройстве, но только в случае гарантированного равенства потенциалов земли в местах размещения оборудования системы. Для большей помехозащищенности провода рекомендуется поместить в экран. Не следует использовать экран в качестве дренажного провода. Возможно увеличение дальности передачи числа устройств до 256 при применении репитеров.
Программная реализация - клиенты сети подключаются простым подсоединением к витой паре с соблюдением полярности. В этом случае возможен конфликт, когда могут работать передатчики нескольких устройств. Он решается чисто программными методами. Дело в том, что при реализации интерфейса RS485 существует главное устройство, именуемое хостом и устройства, которыми оно управляет - клиенты. Каждому клиенту обычно присваивается уникальный адрес. Клиенты изначально находятся в состоянии приема сигнала. Хост посылает в сеть команду, в начале которой указывается адрес клиента, которому она предназначается. Команда выполняется только в случае совпадения адреса клиента и адреса, указанного в самой команде. Остальные устройства находятся в пассивном состоянии.
Стандарт EIA RS485 определяет только электрические и физические характеристики интерфейса. Программная же реализация определяется конкретным применением. В нашем случае удобнее всего было применить протокол обмена интерфейса RS232. Временная диаграмма передачи байта изображена на рис.2.
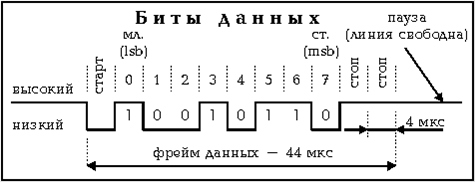 рис.2
рис.2
В этом случае с точки зрения программиста обмен между устройствами ничем не отличается от обмена по RS232, что позволяет использовать одни и те же драйвера.
В наших разработках в основном используются промышленные модули снятия сигнала фирмы Fastwel и Grayhill. В этих модулях обмен осуществляется в ASCII-кодах. Команда передается в следующем формате: в начале идет символ - признак команды (обычно это один из редко используемых символов #, $, ~ и т.д), затем два байта - адрес модуля, к которому идет обращение. Далее следует код команды. Вся посылка завершается кодом CR - "перевод каретки"(0Dh). После выполнения команды модуль посылает ответ опрашивающему устройству, подтверждающий успешное выполнение или ошибку.
Подобную систему команд мы применяем и для разработанных нами контроллеров. Построение команд способом, изложенным выше, позволяет использовать для контроля и настройки оборудования любую терминальную программу, не используя при этом специального программного обеспечения, например, терминал из Norton Commander'a версии 5.0.
Статья в тему
Модели в экономике
Цифровой
проигрыватель (музыкальный плеер, от англ. player, в некоторых случаях
«MP3-плеер») - устройство, которое хранит, организовывает и воспроизводит
музыкальные композиции, сохранённые в цифровом виде, в отличие от аудиоплееров,
которые проигрывают музыку с таких носителей, как ...