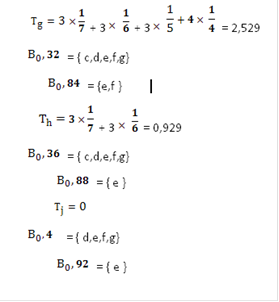
Построение функций принадлежности для каждого показателя
![]()
![]() = 0,015
= 0,015
![]()
![]() = 0,071
= 0,071
![]()
![]() = 0,115
= 0,115
![]()
![]() = 0,255
= 0,255
![]()
![]() (А) = 0
(А) = 0
![]()
![]() (E) =
(E) = ![]()
![]() = 0,524
= 0,524
![]()
![]() (J) =
(J) =![]()
![]()
![]()
![]()
![]()
![]() = 1
= 1
![]()
![]() (B) = 8
(B) = 8![]()
![]() = 0,12
= 0,12
![]()
![]()
![]()
![]() (C) = 7
(C) = 7![]()
![]() = 0,281
= 0,281
![]()
![]() (G) =
(G) = ![]()
![]()
![]()
![]() =0,839
=0,839
![]()
![]() (D) = 6
(D) = 6![]()
![]() = 0,479
= 0,479
![]()
![]() (H) =
(H) =![]()
![]()
![]()
![]()
![]()
![]() =0,939
=0,939
Лифты, подъемники, эскалаторы по В2.
Х= {2, 4, 6, 8, 10, 12, 14, 16, 18}
Обозначим через { a,b,c,d,e,f,g,h, j}
M = 25 шаг = 0,04
Q = {1; 0,96; 0,92; 0,88; 0,84; 0,8; 0,76; 0,72; 0,68; 0,64; 0,6; 0,56; 0,52; 0,48; 0,44; 0,4; 0,36; 0,32; 0,28; 0,24; 0,2; 0,16; 0,12; 0,08; 0,04}

Статья в тему
Система автоматического регулирования захватом руки робота манипулятора
Робот
- это универсальный автомат, позволяющий выполнять механические действия. Его
принципиальной особенностью является быстрая оперативная перестройка с одной
выполняемой операции на другую. Существует несколько разновидностей роботов и
для каждого из них имеется своё определение. ...