Выбор режима работы транзистора
Рис. Выходная мощность и КПД УМ после оптимизации его параметров.
Далее идеальные согласующие цепи (LTUNER2) следует заменить реальными.
Определим необходимые параметры согласующих цепей. Для этого возьмем схему УМ, получившуюся после оптимизации. Удалим из схемы модель транзистора, а к освободившимся выводам трансформаторов LTUNER2 подключим порты (рис. ). Для каждого трансформатора построим графики входных сопротивлений (вещественную и мнимую составляющие) со стороны выводов, к которым был подключен транзистор. Требуемая характеристика добавляется на график с помощью команды Add Measurement → → Linear → ZIN.

Рис. Схема с исключенным транзистором для определения оптимальных параметров согласующих цепей.
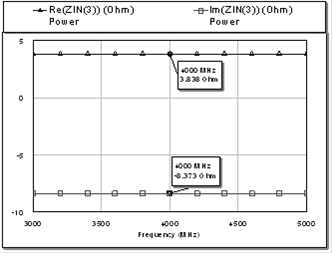
Рис. Вещественная и мнимая составляющие импеданса входного согласующего трансформатора.
При этом входное сопротивление транзистора равно величине комплексно сопряженной полученной (3.84 + j8.37).
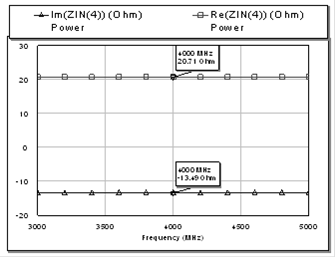
Рис. Вещественная и мнимая составляющие импеданса выходного согласующего трансформатора.
Статья в тему
Идентификация и моделирование нелинейной системы электромеханического следящего привода с трехпозиционным реле
Теория автоматического управления - это наука занимающаяся изучением
разнообразных систем автоматического управления и регулирования, математическим
описанием, моделированием таких систем с целью изучения их свойств,
характеристик. Теория автоматического управления включает следующие ...