Расчёт разделительных и блокировочных емкостей
Рассчитаем разделительные емкости [2]:
 ,
,
где![]() - сопротивление предыдущего каскада,
- сопротивление предыдущего каскада,
![]() - сопротивление следующего каскада,
- сопротивление следующего каскада,
![]() - кол-во разделительных конденсаторов.
- кол-во разделительных конденсаторов.
 ;
;
 ;
;
 .
.
Для расчета емкости эмиттера воспользуемся формулой (“*” обозначаются элементы с выходного каскада):
 ;
;
 .
.
Заключение
В данном курсовом проекте был разработан импульсный усилитель с характеристиками указанным в техническом задании. Выходной каскад обеспечивает требуемое выходное напряжение, а также вместе с входным обеспечивает необходимое усиление.
. Сопротивление источника сигнала и нагрузки Rг=75 Ом.
. Сквозной коэффициент усиления ku=31дБ.
. Длительность усиливаемых импульсов Ти=4 мкс.
. Скважность усиливаемых импульсов Q=100.
. Время установления фронта импульсов tу=6,9нс.
. Спад вершины импульсов на выходе Δ=20%
. Полярность усиливаемых импульсовотрицательная.
. Полярность импульсов на выходе отрицательная.
. Максимальная амплитуда импульсов на выходе Uвых=6 В.
Усилитель имеет небольшой запас по усилению . Это необходимо для того, чтобы в случае ухудшения усилительных свойств коэффициент передачи усилителя не опускался ниже заданного уровня, определённого техническим заданием.
Проверка рассчитанной схемы была выполнена в программе Multisim.
Спроектированный усилитель удовлетворяет всем требованиям, указанным в задании, что говорит о правильности проделанной работы.
Приложение
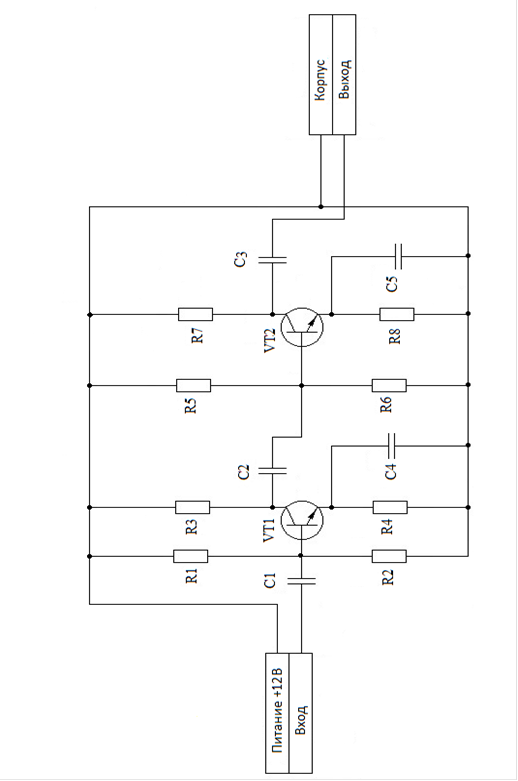
Принципиальная схема
Таблица
|
Наименование |
Кол-во |
Примечание | ||
|
VT1 |
2T607A-4 |
1 | ||
|
VT2 |
2Т608А |
1 | ||
|
Конденсаторы | ||||
|
C1 |
CC0603JRNPO9BN270 - 27 пФ - 5% |
1 | ||
|
C2 |
GRM1885C1H150JA01D - 15 пФ - 5% |
1 | ||
|
C3 |
GRM188F51H473ZA01D - 46 нФ - 5% |
1 | ||
|
C4 |
CC0805ZKY5V6BB106 - 10 мкФ- 5% |
1 | ||
|
C5 |
CC0805ZKY5V6BB106 - 10 мкФ - 5% |
1 | ||
|
Резисторы | ||||
|
R1 |
RC0603JR-073K9 - 3,9 кОм - 5% |
1 | ||
|
R2 |
RC0603JR-072K2- 2,2 кОм - 5% |
1 | ||
|
R3 |
RC0805JR-0751R - 51 Ом - 5% |
1 | ||
|
R4 |
CRCW0402715RFKED - 715 Ом - 5% |
1 | ||
|
R5 |
CRCW040215K0JN- 15 кОм - 5% |
1 | ||
|
R6 |
RC0805JR-078K2 - 8,2 кОм - 5% |
1 | ||
|
R7 |
RC0805JR-0768R - 68 Ом - 5% |
1 | ||
|
R8 |
RC0603JR-07680R - 680 Ом - 5% |
1 | ||
Статья в тему
Создание современной телекоммуникационной сети в Краснодарском крае
Сегодня совершенно очевидно, что научно-технический прогресс во многом определяется скоростью передачи информации, и ее объемом. Возможность резкого увеличения объема передаваемой информации наиболее полно реализуется в результате применения волоконно-оптических кабелей связи, которые по сравнению с ...