Проектирование блока питания
По каналам:
Канал U:
![]() мА,
мА,
![]() В.
В.
Трансформатор подбирается по вторичным параметрам U2 и I2, рекомендуется использовать многообмоточные унифицированные трансформаторы ТПП для питания устройств на полупроводниковых приборах.
Выбираем по справочнику[ 3 ] трансформатор ТПП на 50 Гц, 127/220 В на стержневых сердечниках ПЛМ, конструкция - с уменьшенным расходом меди: ТПП304. Его параметры:
|
Ном. Мощность, В ∙ А |
Ток первичной обмотки, А |
Напряжения вторичных обмоток, В |
Допустимый ток вторичных обмоток, А | ||
|
Номера вторичных обмоток | |||||
|
11 - 12 17 - 18 |
13 - 14 19- 20 |
15 - 16 21 - 22 | |||
|
135 |
1,04 / 0,79 |
4,92 |
10,0 |
2,45 |
3,86 |
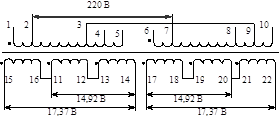
Рисунок12.4 - Трансформатор.
Трансформатор ТПП304 имеет шесть обмоток. При использовании трансформатора ТПП304 - 127/220 В со стержневыми сердечниками ПЛМ на 220 В необходимо: соединить выводы 3 и 9 или 4 и 8, подать напряжение 220 В на выводы 2 и 7.
а обмотки 11-12,17-18,13-14,19-20,15-16,21-22 на 17,37В используем для питания ОУ.
Расчет ёмкостей фильтра выпрямителей:
Сф = tр / (2 ∙ Кп ∙ Rн),
где tр = 0,007 с, а Rн есть отношение:
Rн = Uвхст / Iвхст.
От выпрямителей идёт ветвления на 2 канала:
Канал U:
![]() Ом.
Ом.
Ёмкость фильтров по каналам:
Канал U:
![]() мкФ.
мкФ.
Выбираем танталовый оксидно-полупрводниковый конденсатор[1]
К53 - 1А - 20 В - 47 мкФ ± 10 %.
Заключение
В результате данного курсового проекта нами был спроектирован измерительный преобразователь для термопреобразователя сопротивления.
Эксплуатационные характеристики устройства полностью соответствуют требованиям, содержащимся в задании. К недостаткам разработанного устройства можно отнести значительное количество типономиналов элементов, причём большинство из них должны быть прецизионными, т.к. схема чувствительна к разбаллансу элементов. Путем улучшения ситуации является более широкое применение интегральных микросхем, в частности, ИОН AD581U и инструментального усилителя AD620, т.к. в интегральной технологии элементы их структуры практически идентичны.
Тем не менее, данный ИП имеет возможность гибкой подстройки смещения и крутизны выходной характеристики, что говорит о возможности использования элементов с большим процентным допуском разброса номиналов.
Область применения данного ИП довольно широка: он может применяться везде, где необходимо измерение температуры данного диапазона, с высокой точностью измерения.
Статья в тему
Система автоматического регулирования захватом руки робота манипулятора
Робот
- это универсальный автомат, позволяющий выполнять механические действия. Его
принципиальной особенностью является быстрая оперативная перестройка с одной
выполняемой операции на другую. Существует несколько разновидностей роботов и
для каждого из них имеется своё определение. ...