Выбор и расчет исполнительных двигателей
Выбор устройств усиления управляющих сигналов
В качестве усилителей мощности для приводов роботов с двигателями постоянного тока применяют тиристорные преобразователи, предназначенные непосредственно для управления электродвигателями постоянного тока [10, 19]. Они характеризуются малой инерционностью, мгновенной готовностью к работе, хорошими эксплуатационными качествами. В отличие от непрерывного способа управления двигателем постоянного тока, когда изменение его скорости достигается за счет непрерывного изменения мощности, подводимой к двигателю, для тиристорных усилителей мощности характерен импульсный способ управления. По принципу действия тиристор является импульсным элементом.
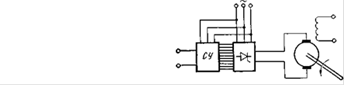
Рисунок 2.2 Функциональная схема управления двигателем
Функциональная схема управления двигателем с помощью тиристорного преобразователя приведена на рисунке 2.2. Тиристорный преобразователь состоит из схемы управления СУ и собственно преобразователя. Источником питания является сеть переменного тока. Для повышения качества следящей системы используют трехфазную сеть повышенной частоты 400 Гц. Преобразователь состоит из двух групп тиристоров, имеющих одностороннюю проводимость, которые образуют мостовую схему. В диагональ моста включен двигатель. При поступлении на вход схемы управления сигнала определенной полярности открывается одна группа тиристоров, и ротор двигателя приходит во вращение. Другая группа тиристоров закрыта управляющими импульсами. При поступлении сигнала противоположной полярности открывается другая группа тиристоров. Напряжение на якоре двигателя регулируется изменением времени проводимости тиристоров.
Статическая характеристика двигателя постоянного тока при импульсном управлении близка к линейной.
Усилитель мощности выбирают по его выходной мощности, необходимой для управления двигателем, по условию
![]() (2.10)
(2.10)
где ![]() - номинальные значения напряжения и тока двигателя (при этом номинальное напряжение усилителя мощности должно соответствовать номинальному напряжению двигателя).
- номинальные значения напряжения и тока двигателя (при этом номинальное напряжение усилителя мощности должно соответствовать номинальному напряжению двигателя).
Для тиристорных усилителей инерционность в основном вносится апериодическим звеном с постоянной времени T=l/(pfo), где f0 - частота питающей сети. Это звено включается на входе схемы управления тиристорными группами для ограничения скорости изменения управляющего напряжения [19].
Статья в тему
Система автоматического регулирования захватом руки робота манипулятора
Робот
- это универсальный автомат, позволяющий выполнять механические действия. Его
принципиальной особенностью является быстрая оперативная перестройка с одной
выполняемой операции на другую. Существует несколько разновидностей роботов и
для каждого из них имеется своё определение. ...